ドローンロボットの工場活用
製造業におけるDX化が進む現在、産業用ロボットの存在は重要であり、そのロボットの重要部品としてロボットハンド(robot Hand)があります。
ロボットハンド(robot Hand)は、人間の手と同様に、モノをつかむ・持ち上げる・運ぶ・支えるといった作業を実現するロボットの一部位を指します。人間の手首より先、手のひらの機能を模した部分をロボットハンド、持つモノを取り回す腕の部分をロボットアームと呼びます。ロボットハンドは、エンドエフェクタ、グリッパーと呼ばれることもあります。基本的にロボットハンドはロボットアームと一組にして利用します。
ロボットハンドとは、ロボットアームの先端やガントリーローダーに取りつけられ、ワークを把持する部位をさします。先端のワークに触れる部位は「爪」と呼ばれ、ロボットハンドには含まれません。
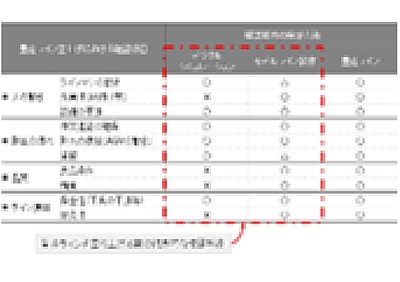
ロボットハンドは作業のスピードや効率に大きく影響する大切な部品です。その種類は一般的に2種類に分けられます。駆動源が空気の「空気圧タイプ」と、駆動源が電力の「電動タイプ」です。空気圧タイプが空気の圧力でロボットハンドを駆動させるのに対し、電動タイプは電力でロボットハンドを駆動させます。タイプによってそれぞれ特長が異なります。
■空気圧タイプの特長
1.コントローラなどの周辺機器が不要なため、電動タイプと比較して簡単に導入できる
2.バリエーションが豊富なため、自社工場の条件に合ったタイプが見つかりやすい
3.軽量な機種が多いため、ロボットの可搬重量内に占めるロボットハンドの割合を減らし、より重たいワークを搬送できる
4.防塵・防水性能を上げやすいため、ロボットハンドの寿命を延ばしやすい
5.把持力が大きい機種が多いため、重量ワークの搬送に採用されやすい
■電動タイプの特長
1.複数のワーク把持位置を設定できるため、1台のロボットハンドでサイズ違い・向き違いのワークを把持できる
2.エア供給用のホースや、ワーク把持を検知するセンサ・スイッチ(ケーブル)が不要
3.電力で動作するため、エアコンプレッサが不要。AGVや走行ロボットとの相性が良いほか、カーボンニュートラルへも貢献している
(参考ブログ)
https://www.pec-kumata.com/post/robothand1